1、背景概述
垃圾吊是垃圾焚烧发电厂焚烧单元供料系统的关键设备,承担着垃圾仓内垃圾的抓料、搬运、抓沟、搅拌混合、自动计量等工作。目前国内绝大多数垃圾吊均采用手动和半自动控制方式。手动模式操作员通过座椅操作杆来控制垃圾吊,其明显缺点是工作繁琐,操作员劳动强度大;半自动状态时燃料垃圾必须靠操作人员手动从垃圾仓中抓取,然后按动手柄上的选择投炉口对应的按钮,投炉口选中后,抓斗会自动升到垃圾仓的最高位置,然后通过大小车的运行抵达所希望的投炉口,抓斗自动打开,投料后自动回到垃圾仓内,等待下一次抓料,其工作效率低下。
要实现电厂的信息化和智能化,就必须得先改变当前繁琐而又重复的劳动,先实现各工艺设备级的自动化和信息化,解放生产力,提高效率。工业物联网的大趋势,智慧电厂行业导向倒逼垃圾吊提升自动化和智能化水平。
2、改造思路
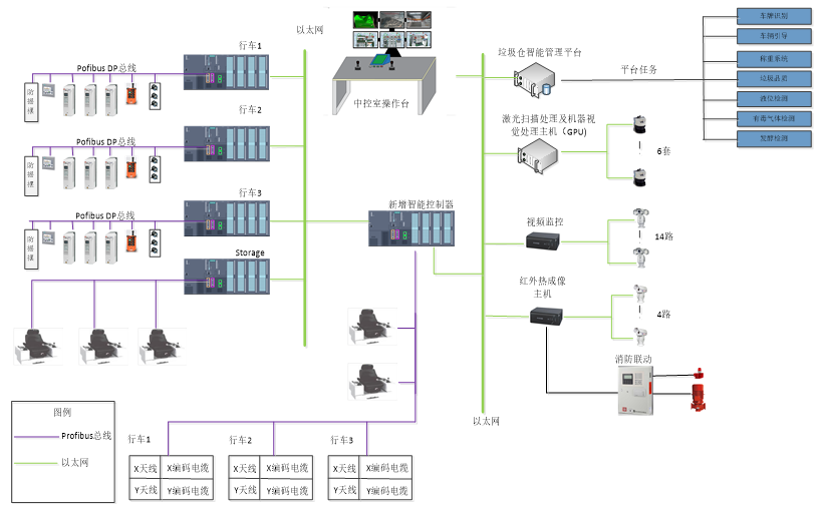
检查原行车变频控制、防摇摆装置、行车编码器、抓斗等功能的正常形,手动手柄操作、半自动操作功能等。整体保留原行车系统功能,采用新增外挂行车智能控制器的方案。考虑改造后系统与原有的控制系统具备兼容和相对独立性,新添加的现场传感器等设备均接入新增的行车智能控制器。新增的行车智能控制器与原控制系统并列运行,可在原系统与智能行车控制之间人工进行切换控制权限。远程自动控制具备一键接管和异常切除自动功能。
新增的行车智能控制器通过独立的以太网口与原行车控制系统以及新的控制系统连接,在新、旧系统之间起到有效隔离作用。行车编码电缆和配备的触摸屏直接连接行车智能控制器,其他系统设备均连接在新增的以太网上。
3、实现功能
a.通过控制系统开发和优化,采用PLC结合高等控制算法实现垃圾吊的全自动控制功能;
b.建立垃圾仓智能管理平台,实现垃圾仓垃圾量、料仓各区域料位、垃圾吊运行状态显示、垃圾仓三维立体模型展示等功能;
c.垃圾吊的远程控制,通过视频接入、虚拟现实(VR)技术和增强现实(AR)等技术实现垃圾吊的远程控制功能。